
تقديم
إليك استعراضا للروبوت الباحث عن الضوء:






لاستكشاف الضوء نعتمد على مستشعرات الضوء CdS بالاساس. ولا يفوتنك أن الترنزستور NPN لن يكون مستغى عنه هنا.
الأجزاء الرئيسية






l بطاريات 9 فولط
l بطاريتين أو 4 بطاريات عادية للمحرك
l مستشعرين للضوء من نوع CdS
l ترنزستورين NPN
l مقاومتين (1 كيلوأوم) (ستسعملان لأجل الترنزستورين)
l لوحة أردينو الاليكترونية (سنستعمل في مثالنا هذا النوع Duemilinove لكن يمكنك أن تستعمل أيضا الانواع اﻷخرى كـ Uno و Diecimila و NG ….)
l قاعدة الروبوت (سنتكلم عنها فيما يلي)
قاعدة الروبوت
|
|
|
تم استعمال عجلات مسننة (أو قل مدببة). لكن ليس مهما استعمال هذا النوع من العجلات.اذ لم تكن متواجدة عندك فاﻷحرى أن تحاول صنعها بنفسك أو تستبدلها بعجلات عادية وهذا هو اﻷسهل. لكن دعنا نفترض أنه بإمكانك الحصول عليها إما عن طريق شرائها من خلال الانترنت أو محلات الاليكترونيك في بلدك. نقول هنا أنك تحتاج قاعدة مزودة بمحركين وعلبة الدوائر المسننة (gearbox) وحاملة بطاريات وقاعدة.
من الاحسن إضافة طبقة أخرى على القاعدة الرئيسية للروبوت من أجل حمل لوحة Arduino. هذه الطبقة عبارة عن خُشيبة أو قطعة بلاستيكية مربعة الشكل.
إذا افترضنا أنك ستستعمل هذا النموذج بحذافره فدعني أقول لك أنه تم شراء علبة الدوائر المسننة مصحوبة بمحركين DC. |

تركيب مستشعرات الضوء
|
|
|
تعمل المستشعرات CdS على استكشاف درجة سطوع الضوء حيث تتغير مقاومتهما الداخلية اعتمادا على كمية الضوء المستقبَلة. طريقة تركيب هذه المستشعرات تتمثل كالتالي: يجب أن يوصل أحد مربطي كل مستشعر على حدى بالمدخل الأرضي (GND) لبطاقة Arduino. ويوصل الطرف الآخر بالمدخل التناظري (analog input pin) للوحة Arduino.
غير أنه يبقى للشخص أن يُعَرف pin كمدخل (أي INPUT ) باستعمال الدالة pinMode ثم يستعمل الدالة digitalWire لتهيئة المدخل بالقيمة HIGH كالتالي: |

|
void setup() { |
|
باستعمال هذه الشيفرة يمكنك قراءة قيمة المقاومة المولدة من طرف كل مستشعر ضوئي واستعراضها على شاشة اليكترونية. هذا هو الجزء الاول من الروبوت. سنناقش فيما يلي كيفية استعمال هذه القيم من أجل التحكم بالمحركات. طريقة تركيب هذه المستشعرات تتمثل كالتالي: طريقة التركيب سهلة جدا: قم فقط بإيصال مربط واحد لكل مستشعر بالارضية (ground pin). أما بالنسبة للمربطين المتبقين فيتم وصلهما بالمدخلين 1 و 2 للوحة Arduino أي (pin 1 وpin 2) بحيث يكون pin 1 موصلا بالمستشعر اﻷيمن بينما يوصل pin 2 بالمستشعر اﻷيسر.
ملاحظة يوجد ترنزستورات داخلية (في البطاقة Arduino) تسمى بترنزستورات (pullup transistors). مرابط البطاقة البرمجية (مداخل أو مخارج) تطون مدعومة بهذا النوع من الترنستورات. سيتم التعامل معهم في شيفرة الروبوت بالفقرة التالية. |
برمجة مستشعرات الضوء
 |
|
// قم بنسخ هذه الشفرة انطلاقا من هذا السطر شيفرة للتعامل مع المستشعرين // Arduino Duemilinove استعمال لوحة
/**************************تعريف الثوابت***************************/ /* سيستعمل هذا المتغير لتنشيط أو إقفال عمل المحرك اﻷيمن. موصول بقاعدة الترنزستور */ const int RightMotor = 2; /* سيستعمل هذا المتغير لتنشيط أو إقفال عمل المحرك اﻷيمن. موصول بقاعدة الترنزستور */ const int RightSensor = 1; //سيستعمل هذا المتغير لقراءة قيمة المستشعر اﻷيمن const int LeftSensor = 2; //يستعمل هذا المتغير لقراءة قيمة المستشعر اﻷيسر تعريف المتغيرات//
{ /* سنعرف المتغير LeftSensor كـ "مدخل" ليتم القراءة من خلاله فيما بعد*/ pinMode(LeftSensor, INPUT); /* سنعرف المتغير RightSensor كـ "مدخل" ليتم القراءة من خلاله فيما بعد*/ pinMode(RightSensor, INPUT); /* تفعيل ترانزستور pull-up داخلي*/ digitalWrite(A1, HIGH); /* تفعيل ترانزستور pull-up داخلي ثاني*/ digitalWrite(A2, HIGH); /* نعرف سرعة تحويل المعلومات*/ Serial.begin(9600); /* إظهار رسالةلا غير بعد تنفيذ هذه الدالة*/ Serial.println(" \nReading Light sensors."); { // لحساب القيمة المطلقة للفارق بين قيمة المستشعر اﻷيمن وقيمة المسشعر اﻷيسر
/************************************************************** سيستعمل المقطع التالي من الشيفرة لإظهار بعض الجمل والقيم العددية للمتغيرات على الشاشة أثناء البرمجة فقط لتتأكد من عمل هذه الشيفرة بشكل جيد لا غير. هل تعرف ما يسمى هذا المقطع البسيط في عالم البرمجة؟ انه يسمى debugging ****************/
Serial.print("Left Sensor = "); // لإظهار الجملة بين اشارتي الاقتباس |
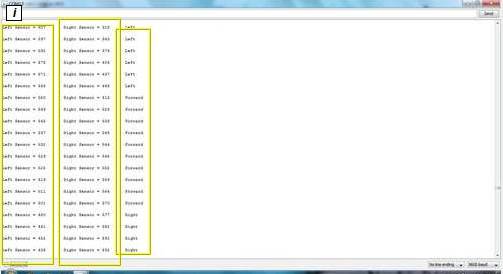
ما عليك الآن إلا أن تمرر يديك أمام المستشعرين وإذا كنت أوصلت كل شيء على ما يرام فالمفترض أن ترى القيم تتغير على الشاشة كما هو مبين على الصورة. ستلاحظ أن المستشعر كلما استشعر ضوءا خفيفا فإن قيمته ستكون مرتفعة والعكس صحيح.
بالنسبة لي شخصيا، أحب أن ترجع الدالة analogRead القيمة 0 كأدنى قيمة عندما يكون الضوء مظلما، والقيمة 1023كأقصى قيمة عندما يكون الضوء ساطعا.
بهذا، سيسهل علي التعامل مع قيم عددية محصورة في مجال معين وبالتالي أسهل علي تحريك الروبوت فيما بعد بدون جهد أو تكلف.
لن أحتاج هنا لتعديل شيئا ما في الدارة الكهربائية بل فقط بعض التعديلات الطفيفة على الشيفرة.
سنغير المقطع التالي فقط في الشيفرة:
|
SensorLeft = analogRead(LeftSensor); SensorRight = analogRead(RightSensor); |
قم بتغييره كالتالي:
|
SensorLeft = 1023 - analogRead(LeftSensor); SensorRight = 1023 - analogRead(RightSensor); |
يبدوا أن اﻷمر واضح هنا، إذا لم تفهم يمكنك ترك سؤال أو تعليق أسفله.
ملاحظة: قد تكون القيمة القصوى والقيمة الدنوية للمستشعرات التي حصلت عليها مختلفة عني. وبالتالي لمعرفة هذه القيم قم بوضع المستشعرين في منطقة مظلمة حالكة جدا ثم خذ القيمة التي حصلت عليها واعمل نفس الشيء في منطقة ساطعة جدا.
تحليل واستفسار
كما ترى أن لنا ثلاث قيم متغيرات أساسية في برنامجنا هذا: قيمة المستشعر اﻷيمن و قيمة المستشعر اﻷيسر وقيمة الفارق بينهما. فكيف يا ترى يمكننا التعامل مع هذه القيم للتحكم بحركة محركات الروبوت؟؟؟؟
جواب واستبشار
الطريقة بسيطة فابشر:
إذا كان الفارق بينهما أصغر من عتبة محددة (قيمة عددية ثابتة) --> على الروبوت أن يتجه أماما.
إذا كانت قيمة المستشعر اﻷيمن أكبر من قيمة المستشعر اﻷيسر --> على الروبوت أن يتجه يمينا.
إذا كانت قيمة المستشعر اﻷيسر أكبر من قيمة المستشعر اﻷيمن --> على الروبوت أن يتجه يسارا.
برمجيا
نترجم الكلام السابق كما يلي برمجيا:
|
if(SensorDifference <= 75) // تم اعتبار 75 كعتبة عددية محددة {
{
{ |
لماذا تم اختيار 75 كعتبة محددة؟؟
الجواب، اذا لم تعجبك فاختر أي قيمة صغيرة كما تحب وارحنا من كثرة التفسير.
على أي، لم نعط اﻷمر للمحركات لحد الآن بأن تتحرك أماما، يمينا أو يسارا وفق الشيفرة أعلاه. لمعرفة تفاصيل هذا اﻷمر تتبع الفقرتين التاليتين.
تركيب المحركات والبقية
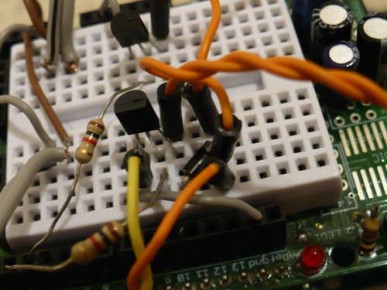



قم بتركيب جميع المركبات الاليكترونية كما هو مبين في الدارة الكهربائية البسيطة في الصورة أعلاه.
تثبيت المقاومة (1 كيلوأوم) والمحرك اﻷيمن والترنستور المساعد له:
1. قم بإيصال إحدى طرفي المقاومة بالمدخل 2 للبطاقة Arduino (وهو المدخل الذي يمثل المحرك اﻷيمن).
2. ثم صل الطرف الآخر للمقاومة بأي ثقب في اللوحة البلاستيكية المثقبة.
3. لإضافة الترنزستور، قم بتثبيت قاعدة الترنزستور في الثقب المجاور أي المحادي تماما لمربط المقاومة.
4. بعدها قم بتثبيت جامع الترنزستور بحيث يكون محاديا لمربط المحرك اﻷيمن على اللوحة البلاستيكية.
5. وسيبقى طرف واحد للترنستور والمسمى بالباعث فصله باﻷرضية (أعني أحد مداخل البطاقة Arduino المرموز له بـ GND).
6. صل طرف المتبقي للمحرك الأيمن بالقطب الموجب للبطارية.
تثبيت المقاومة (1 كيلوأوم) والمحرك اﻷيسر والترنستور المساعد له:
1. قم بنفس العمل بالنسبة للمحرك اﻷيسر بشرط أن تستعمل المدخل 3 (عوض 2) للبطاقة Arduino.
2. لا تنسى أن تصل القطب السالب للبطارية باﻷرضية (أعني مرة أخرى مدخل البطاقة Arduino المرموز له بـ GND).
برمجة المحركات
|
|
|
ما زلت تتذكر أننا عرفنا متغييرين سميناهما: RightMotor و LeftMotor، أليس كذلك؟؟؟ يجب أن تعرف أو تتذكر أنه لإرسال أوامر التحكم الى المركبات الاليكترونية نستعمل الدالة digitalWrite والتي يمكن استخدامها بإعطاءها قيميتن: رقم المدخل الموصول به المركب الاليكتروني و الحالة التي نريد بها أن يتصرف المركب الاليكتروني.
في حالتنا هذه: المركب الاليكتروني هو: المحرك. والحالة هي:إما HIGH أي مشتغل أو LOW أي منطفئ. |
هاكم اﻵن توجيه المحركات برمجيا:
|
if(SensorDifference <= 75) // اتجه أماما { { { |
الشيفرة الكاملة
حسنا، وصلنا الى الحلقة اﻷخيرة. إذا تم وفهمت ما تم شرحه أعلاه فهاهي الشيفرة كاملة وما عليك إلا أن تنسخها عندك وامتحن روبوتك:
|
// قم بنسخ هذه الشفرة انطلاقا من هذا السطر
تعديل الشيفرة: محمد السهلي /*تعريف الثوابت*/ /* سيستعمل هذا المتغير لتنشيط أو إقفال عمل المحرك اﻷيمن. موصول بقاعدة الترنزستور */ const int RightMotor = 2; /* سيستعمل هذا المتغير لتنشيط أو إقفال عمل المحرك اﻷيمن. موصول بقاعدة الترنزستور */ /*تعريف المتغيرات*/
{ /* سنعرف المتغير LeftSensor كـ "مدخل" ليتم القراءة من خلاله فيما بعد*/ pinMode(LeftSensor, INPUT); /* سنعرف المتغير RightSensor كـ "مدخل" ليتم القراءة من خلاله فيما بعد*/ pinMode(RightSensor, INPUT); /* تفعيل ترانزستور pull-up داخلي*/ digitalWrite(A1, HIGH); /* تفعيل ترانزستور pull-up داخلي ثاني*/ digitalWrite(A2, HIGH); /* نعرف سرعة تحويل المعلومات*/ Serial.begin(9600); /* إظهار رسالة*/ Serial.println(" \nReading Light sensors."); { // لحساب القيمة المطلقة للفارق بين قيمة المستشعر اﻷيمن وقيمة المسشعر اﻷيسر
/************************************************************ سيستعمل المقطع التالي من الشيفرة لإظهار بعض الجمل والقيم العددية للمتغيرات على الشاشة أثناء البرمجة فقط لتتأكد من عمل هذه الشيفرة بشكل جيد لا غير. هل تعرف ما يسمى هذا المقطع البسيط في عالم البرمجة؟ انه يسمى debugging ****************/
Serial.print("Left Sensor = "); // لإظهار الجملة بين اشارتي الاقتباس /********************** هذا المقطع الرئيسي لتحرك الروبوت. هنا نقوم بمعالجة وتحليل القيم وتوجيه الروبوت من خلالها **************************************/
if(SensorDifference <= 75) // اتجه أماما { Serial.print(“Forward”); // فقط لإظهار رسالة مفادها أنه يتجه أماما { Serial.print(“Right”); // فقط لإظهار رسالة مفادها أنه يتجه يمينا { Serial.print(“Left”); // فقط لإظهار رسالة مفادها أنه يتجه يسارا Serial.print("\n"); // للرجوع الى السطر |
نفس المبدأ
الروبوت المبين في هذا الفيديو يستخدم مستشعر الموجات فوق الصوتية. وإذا أردت أن تبرمجه فما عليك إلا أن تزور هذا المقال.
أخيرا





ليس مهما أن تنشىء نفس الروبوت بحذافره، يمكن أن تستخدم مستشعرات اليكترونية أخرى (انظر الى كيف تصنع روبوتك “المستشعرات الاليكترونية”) لكن تتبع نفس المبدأ.
إذا أنجزت شيئا قم بتحرير مقال عنه والموقع اصنعها مفتح أبوابه لك، انشر ما انجزت على هذا الموقع لتعم الفائدة.
تأليف
المؤلف: Chowmix12
ترجمة وتحرير: محمد السهلي
{jumi [*3]}
المراجع
http://www.instructables.com/id/First-Arduino-Robot-Light-Seeker/
التعليقات
اخي الكريم احييك طحيه طيبه علي ما تقدمه
وشكرا علي هذا المقال الاكثر من رائع
وسوف احاول تنفيذه باستخدام ال pic وسوف اطلعكم علي تجربتي
الاحظ اخي ان اكثر الروبوتات ان لم تكن كلها باستخدام الاردوينو وكما تعلم اخي فالاردوينو تقنيه جديده لم تنتشر في عالمنا العربي بصوره كبيره
لكن اغلب الناس لديها خلفيه عن ال pic و ال avr فارجو اذا امكن تنفيذ هذه المشاريع او مجرد شرحها باستخدا ال pic او ال avr
وشكرا علي مجهودكم الرائع
إن شاء الله يكن خيرا.
وللإشارة فقط فأريد أن أقول أنه بإمكانك معرفة المشاريع وكل المقالات عن المتحكم PIC وكذلك عن المتحكم AVR عن طريق الضغط على إسميهما في أسفل الموقع. أعني ستجدهما في "سحابة إصنعها". انظر للأسفل. ستجد في كل واحدة منهما بعض المشاريع المبنية عليهما. ولا يفوتنك أن أردوينو تستعمل المتحكم avr أيضا.
ملاحظة: حاول أن تكتب باللغة العربية الفصحى وليس العامية حتى يفهمك الكل.
شكرا
والتي ربطنا عليها كيابل التوصيل ... لأنني سأطلبها من الخارج ولم أجد لها إسم