
{jumi [*3]}
تقديم
أولا وقبل كل شيء أترككم مع الفيديو التالي لاستعراض تحرك الروبوت:
وهاكم إحدى تطبيقاتها في الحياة اليومية (البقية في نهاية المقال)
هذا نموذج لروبوت بسيط يستعمل مبدلا كهربائيا (قاطع كهربائي) بسيطا كمستشعر ويقف باتزان على عجلتين فقط.
عندما يوشك الروبوت على السقوط يبدأ حينها المحرك الكهربائي بالعمل ودفع الروبوت في اتجاه السقوط وبالتالي يحصل التوازن.
قد يبدو اﻷمر غريبا لدى البعض، لكن فكر في اﻷمر قليلا وستفهم السر.
ليتمكن الروبوت من تحقيق التوازن يجب وضع المحرك في مركز ثقل الروبوت.
1. الأجزاء الرئيسية










محرك كهربائي
دوائر مسننة (أو يمكنك الحصول على محرك مدعوم بدوائر مسننة)
عجلتين
قطع بلاستيكية
4 بطاريات متوسطة الحجم (4AA)
حاملتين بطاريتين
صدفة (قطعة معدنية أو بطارية ساعة مثلا)
قاطع تيار (toggle switch)
مبدل كهربائي (SPDT switch)
بعض اﻷسلاك الكهربائية
مصمار واحد
لحام
لصاق
قضيب معدني
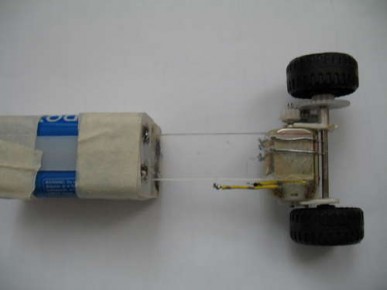
2. تركيب قاعدة الروبوت









اﻷمر سهل هنا، حاول فقط أن تضم اﻷشياء بعضها ببعض كما هو مبين في الصور أعلاه من أجل تحريك الروبوت.
ما عليك هو أن تجعل المحرك يدير العجلتين عن طريق الدوائر المسننة. اربط اﻷشياء بعضها ببعض ولا يهم كيف أتممت ذلك.
3. تركيب هيكل الروبوت






قم الآن بتركيب قطعة بلاستيك صلبة على صفحة المحرك الكهربائي من أجل بناء العمود الفقري للروبوت.
سيحمل العمود الفقري حاملة بطاريتين خلفه وأخرى أمام وبهذا نكون أكملنا هيكل الروبوت.
4. المستشعر




لا تحتاج لأن تشتري مستشعرا كهربائيا، بل سننجز واحدا بسيطا بأنفسنا.
قم بتلحيم الزر المعدني (في حالتنا هذه: بطارية ساعة) حتى يلتصق بمقبض المبدل الكهربائي (SPDT switch).
ركز معي في هذه النقطة: قم بتسخين رأس المسمار وألصقه على القطعة البلاستيكية بحيث عندما يقف الروبوت عموديا يلامس الزر المعدني (بطارية الساعة) اﻷرض.
في هذه الحالة ثبت الزر المعدني على الروبوت بلصاق.
5. تركيب قاطع التيار





قم اﻵن بإيصال القطب الموجب ﻷحدى حاملات البطارية بالقطب السالب للأخرى.
صل كذلك نفس السلك الكهربائي بقاطع التيار ثم صل الجهة اﻷخرى لقاطع التيار بالمحرك.
يمكنك الاستعانة بالخطاطة التالية من أجل تفادي أخطاء تركيب الدارة الكهربائية.






قم بإيصال اﻷسلاك كما هو مبين في الخطاطة ويجب أن تصلها بطريقة حيث تمكن الروبوت من التحرك أماما أي التحرك في الاتجاه المفترض أن يقع عليه.
6. تجريب





نعم وصلنا الى نهاية مقالنا هذا. وما عليك اﻵن إلا أن تمتحن ما أنجزته.
قم بوضع أربع بطاريات في أماكنها وشغل الروبوت عن طريق قاطع التيار.
إذا رأيت أمرا غريبا في اتزان روبوتك قم بتعديل مكان المستشعر حتى يعمل الروبوت بشكل أفضل.
إذا تحرك الروبوت في الاتجاه المعكس فقم باستبدال السلكين الكهربائيين اﻷحمر واﻷزرق في المستشعر أو في حاملتي البطاريات. والسلام.
التأليف
المؤلف : محمد اليوسفي
ترجمة بتصرف : محمد السهلي
{jumi [*3]}
{jumi [*3]}
{jumi [*3]}
المراجع
http://www.instructables.com/id/Balancing-Robot/?ALLSTEPS
نماذج أخرى مشابهة
نفس المبدأ تجده مطبقا في الإنجازات التالية، فماذ عنك أنت ماذا تنتظر؟
نماذج بسيطة
ماذا لو استخدمناها لشيء آخر؟
نعم هكذا نتطور، ننشىء نموذجا أكبر بقليل
هذه ربما غريبة!
من شركة هوندا، نفس المبدأ لكن بعجلة واحدة فقط!
طويوطا لن تستسلم حتى هي:
وثائقي عليها:
التعليقات
gooooooooooooooooooooooooooooooooood